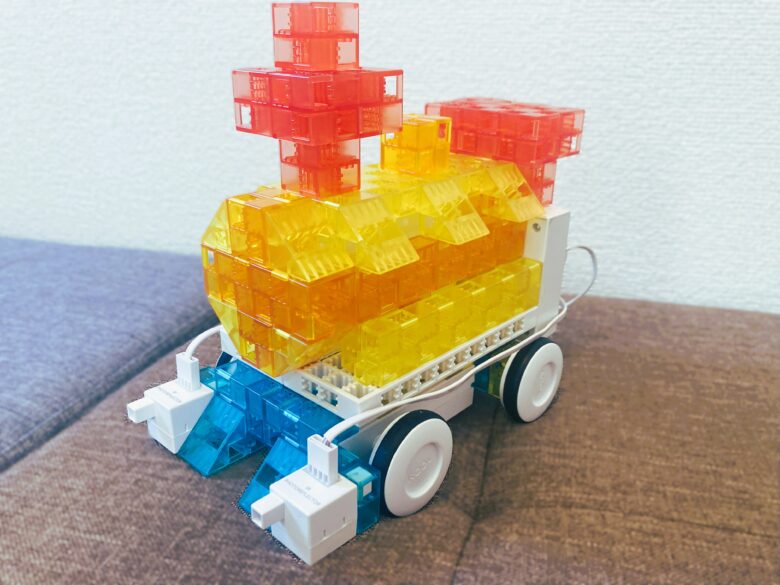
課題#6 2つの赤外線フォトリフレクタで高精度ライントレース
KOOVの作例「機関車」は、単一の赤外線フォトリフレクタでラインを追跡します。
この課題では、フォトリフレクタを1つから2つに増設し、左右前方に配置することで、カーブや分岐でもより安定した走行を実現します。
ハードウェア改造とプログラム改良を同時に行うことで、子どもたちに設計と制御の結びつきを体験させる絶好の教材になります。
先生や親御さんへ
この課題は、プログラミング教育の必修化に伴い、子どもたちに楽しくプログラミングを教えるために作成した教材です。
未経験の先生や、家庭で子どもと一緒にプログラミングを学びたい親御さん向けに、ロボットプログラミングを通じて、子どもたちの論理的思考力や創造性を伸ばすきっかけとなれば幸いです。
チャレンジ課題の一覧はこちら

この課題で学べること
- 複数センサーの取り付け位置と作用原理:
前方左右にフォトリフレクタを増設し、センサー配置がライントレース性能に与える影響を実感します。 - 条件分岐によるモーター制御の応用:
左右各センサーの反射値を比較し、適切にモーターを制御するロジック構築を通じて条件分岐の実践力を身につけます。 - ハードウェアとソフトウェアを組み合わせた最適化設計:
フォトリフレクタの物理的配置とプログラムの調整を連動させ、システム全体のパフォーマンスを引き出す設計思考を体験します。
課題の概要
KOOVの作例『機関車』は、前方中央1点の赤外線フォトリフレクタでラインを検出していました。
このままでは急カーブや分岐で誤動作が起きやすくなります。
そこで赤外線フォトリフレクタを前方左右に2つ設置し、左右どちらのラインも同時に監視できるように改造します。
プログラムでは、左右のセンサー値を比較しながら動作を切り替えることで、高精度なライントレースを狙います。
本課題では、作例「機関車」を作成済みであることを前提に説明を進めていきます。
使用するツール
- KOOVアドバンスキット
- (作例「機関車」を作成できるパーツセット)
- PC、またはタブレット
- 『KOOV』アプリをインストールしたもの
ハードウェアの改造
追加パーツ
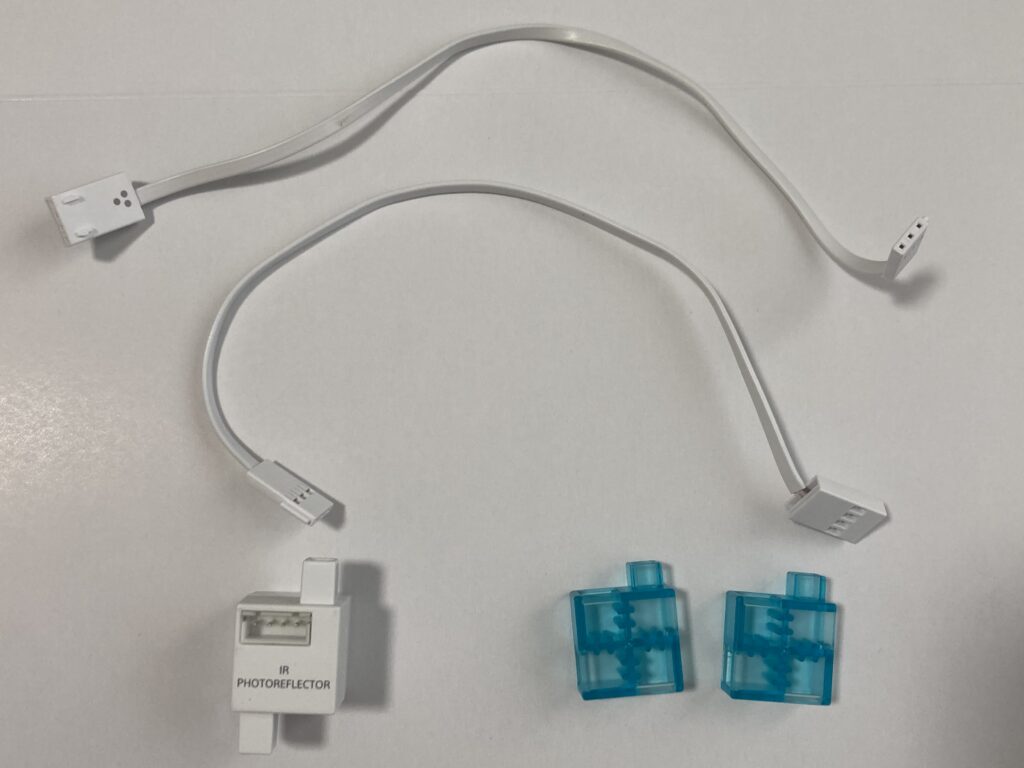
- 赤外線フォトリフレクタ × 1
- ハーフCブルー × 2
- 3芯ケーブル20cm × 2
改造手順
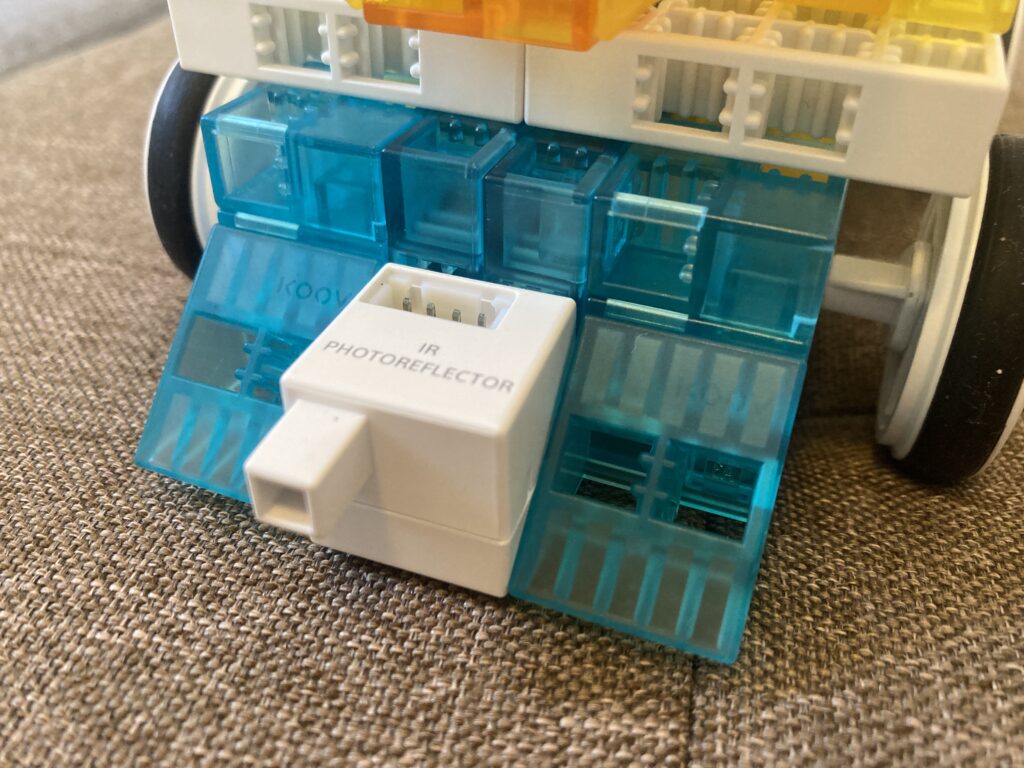
- 前方中央の赤外線フォトリフレクタを取り外します。

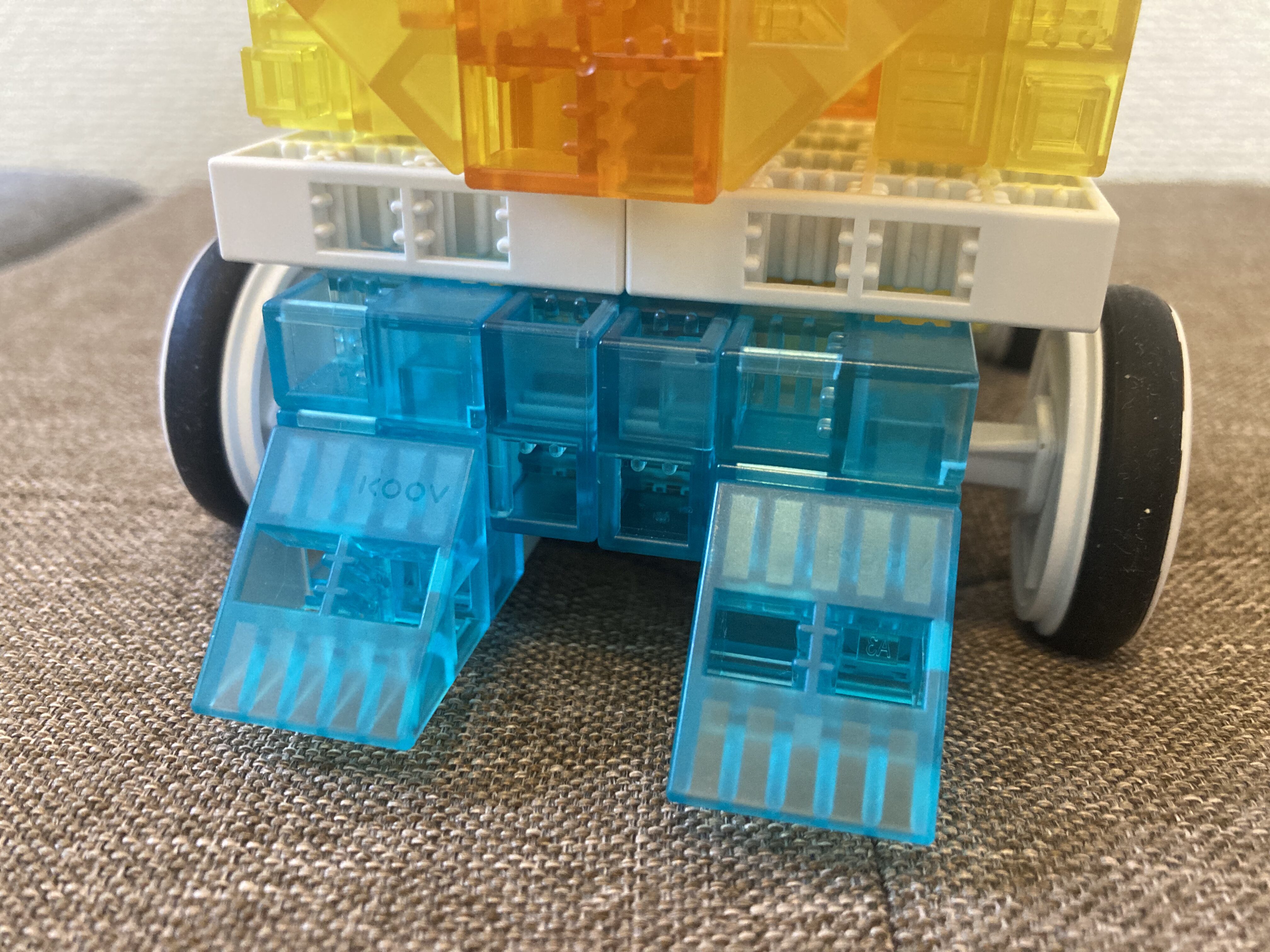
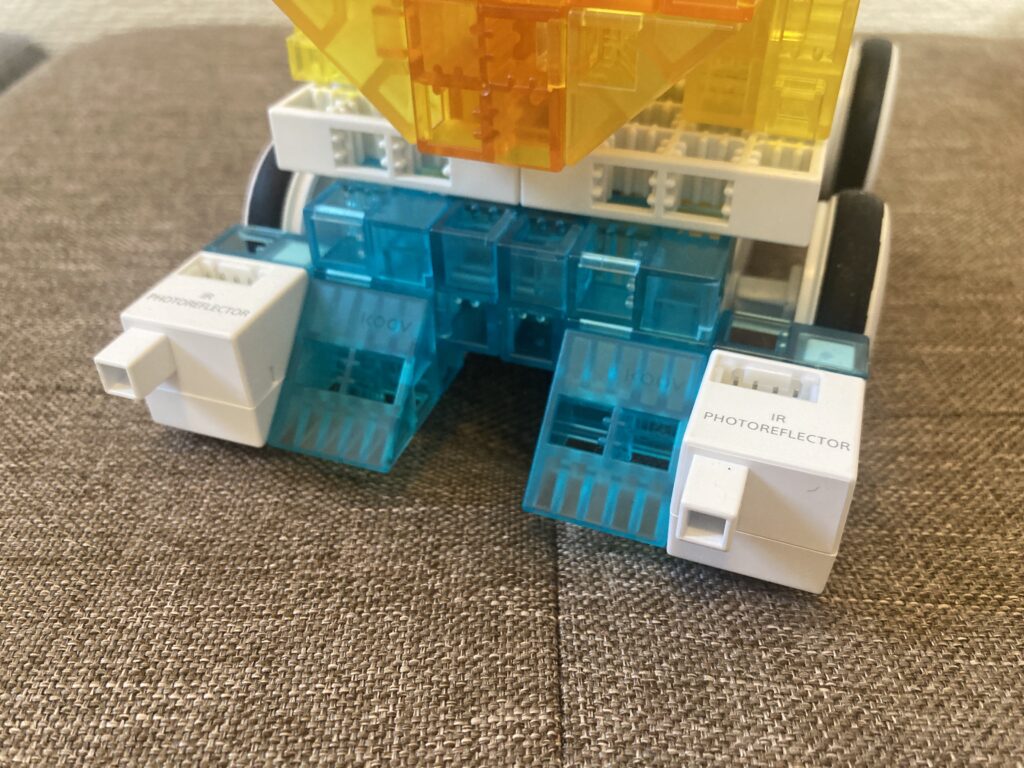
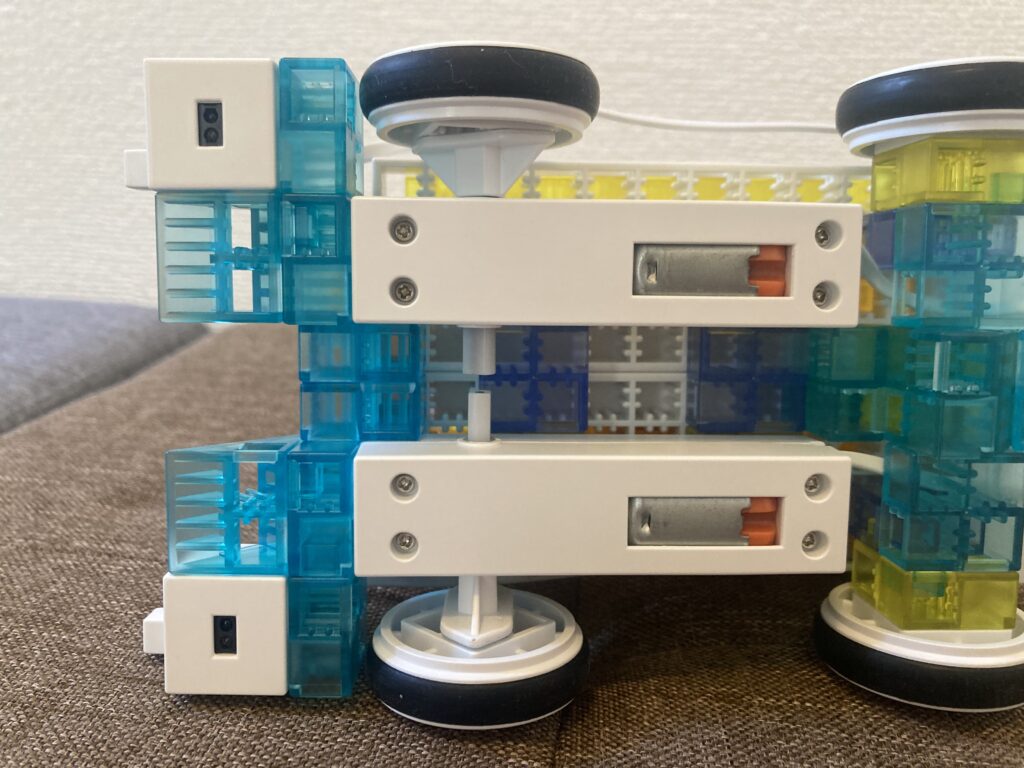
- 正面の左右(前タイヤの前方)に、ハーフCブルーを取り付けます。
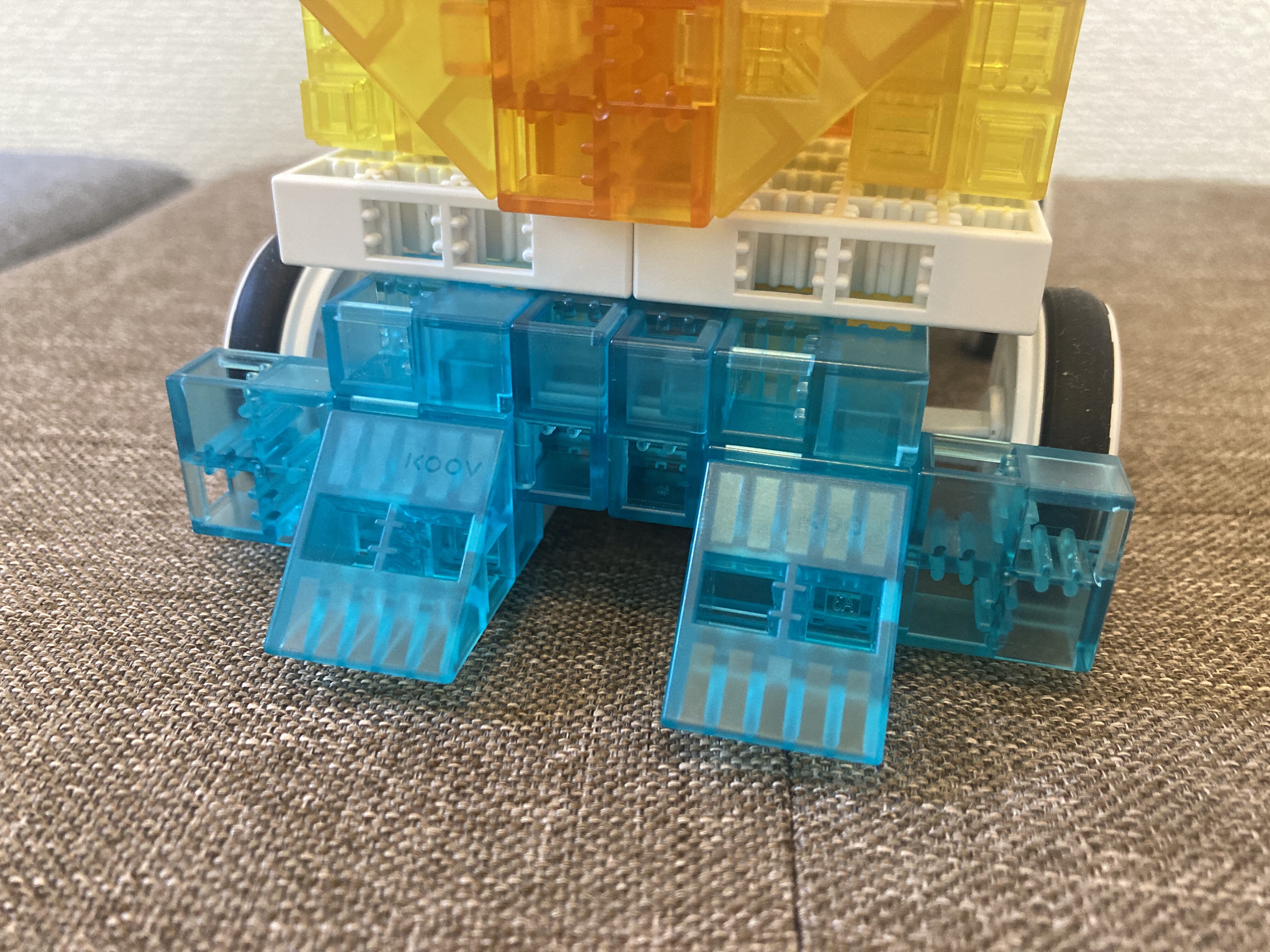
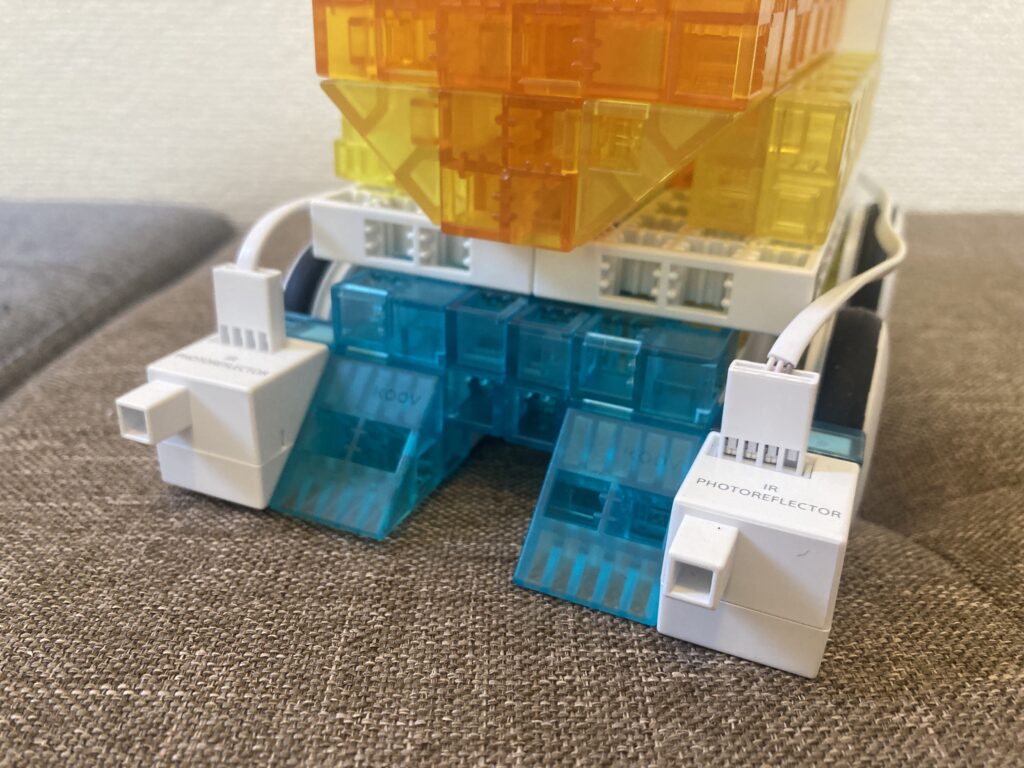
- 2で取り付けたハーフCブルーの正面側に、赤外線フォトリフレクタを取り付けます。
センサー部分が下を向くように取り付けてください。
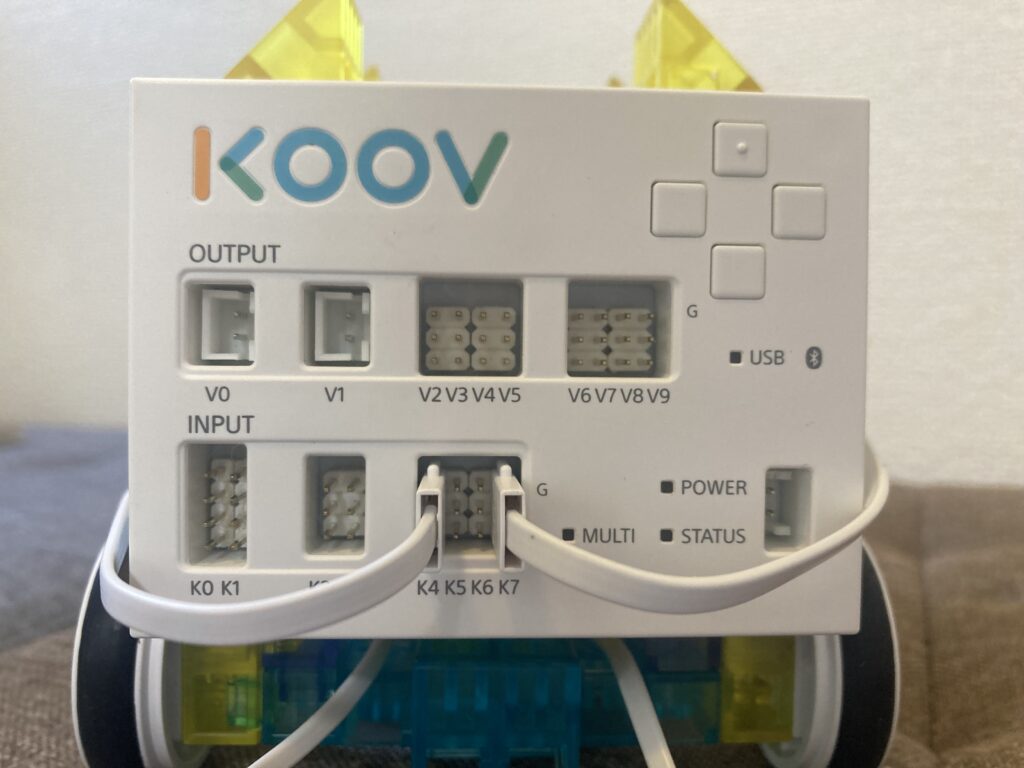
- 左右それぞれのセンサーに、3芯ケーブルを取り付け、左側をK4、右側をK7に接続します。
以上で、ハードウェアの改造は完了です。