
KOOVにはたくさんの「ロボットレシピ」とそのサンプルプログラムが豊富にそろっています。
そのまま動かして遊ぶだけでも楽しいですが、「どうして動くのか?」「どんなしくみで反応しているのか?」を知ることで、プログラミング的思考がぐっと深まります。
今回は、実用性と学習要素を兼ね備えた作例「ライントレーサー」を取り上げて、遊び方・プログラムのしくみ・改造のヒントまで、わかりやすく解説します!
作例「ライントレーサー」とは?
「ライントレーサー」は、黒い線(黒テープなど)をセンサーで読み取り、そのラインに沿って自動で進むロボットです。
現実世界の自動運転や工場の搬送ロボットと似たしくみを体験できる、応用性の高い作例です。
KOOVの中では比較的シンプルな構造ですが、センサーによる判断とモーターの制御という基本がしっかり詰まっており、初級~中級のステップアップに最適です。
作成可能キット
ライントレーサーはベーシックキット2以上で作成可能です。
| キット | 作成可否 |
|---|---|
| エントリーキット | × |
| ベーシックキット2 | ● |
| スターターキット | ● |
| アドバンスキット | ● |
※赤外線フォトリフレクタとDCモーターで作成可能

「ライントレーサー」の遊び方
- 白い紙に黒ラインを書いたコースを準備する(黒いマスキングテープでもOK)
- ロボットを、黒ライン上に置いた状態で、本体の上ボタンを押す
- 赤外線フォトリフレクタがラインを検知し、左右のタイヤを制御して黒ラインに沿って走行する
シンプルな動きながら、コース取りやスピードの微調整によって動き方が大きく変わるため、子どもも大人も熱中できる作例です。
カーブや分岐を含んだコースにすることで、観察力や工夫する力も育まれます。
入力と出力の仕組み

| 入力要素 | 内容 |
|---|---|
| 上ボタン | ボタンを押すごとに、走行開始、停止を切り替える |
| 赤外線フォトリフレクタ | 白い背景と、黒いラインを検出する |
| 出力要素 | 内容 |
|---|---|
| LED | 走行中にLEDを点灯させる |
| DCモーター | 左右のタイヤを制御する |
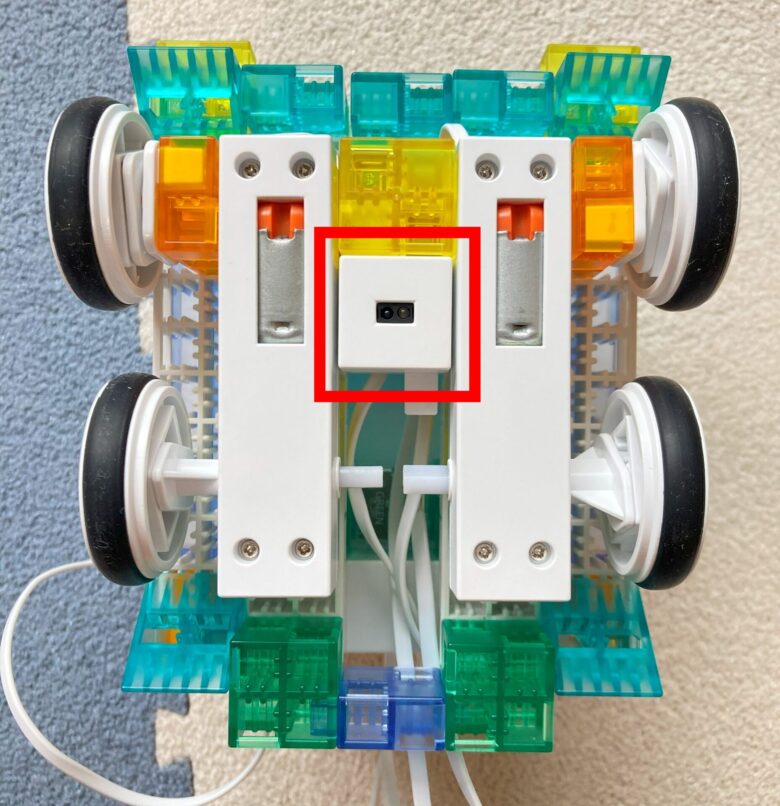
車体の中央に赤外線フォトリフレクタがあり、黒いラインの検出を行います。
プログラム解説
ライントレーサーのプログラムは、以下のような流れで構成されています。
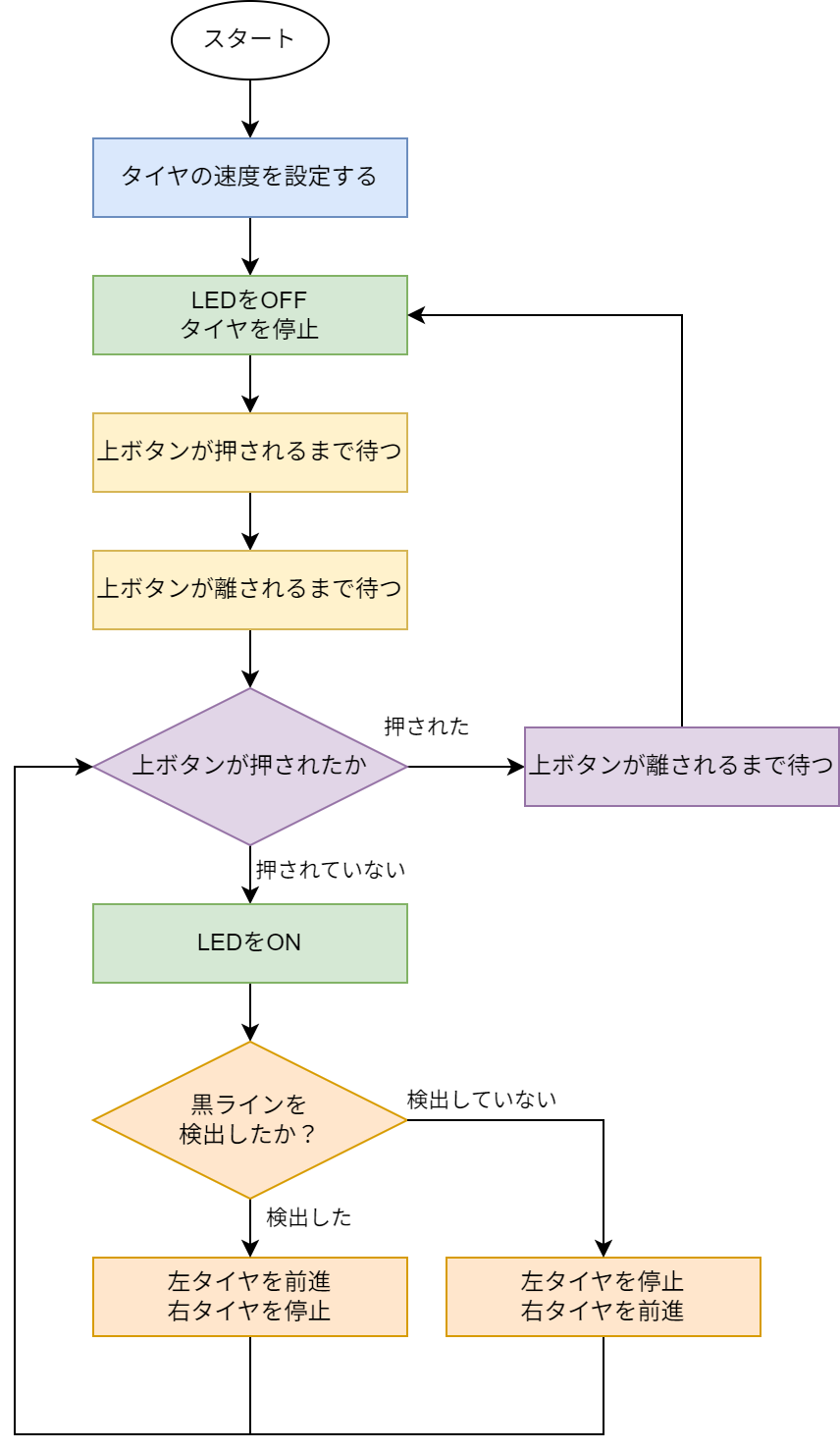
このプログラムは、次の4つのフェーズで構成されます。
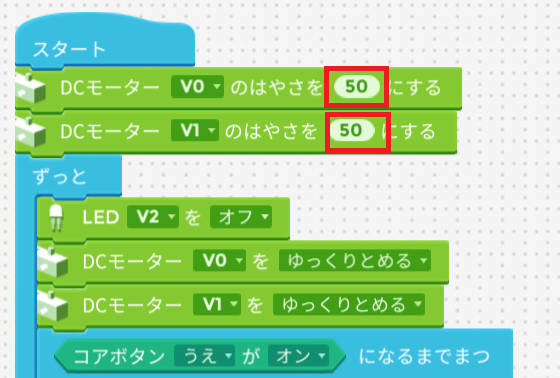
- 『タイヤ速度の初期設定』フェーズ
- 『ボタンを押して走行開始する』フェーズ
- 『赤外線フォトリフレクタでライン検知し、タイヤを制御する』フェーズ
- 『ボタンを押して停止する』フェーズ
フローチャートはそれぞれのフェーズに合わせて色分けしています。
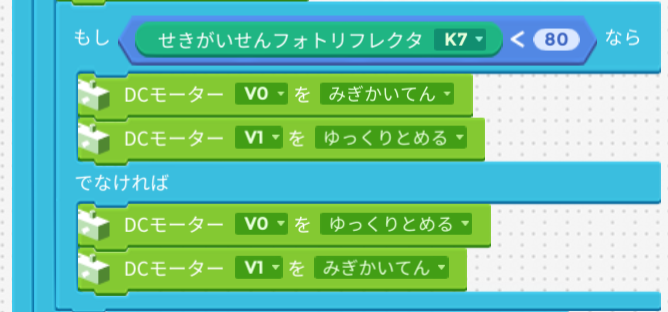
『黒いラインの検出』は「赤外線フォトリフレクタの値 < 80」で判定しています。
白い背景の検出時は値が80より大きく、黒いラインの検出時は80より小さくなると想定されたプログラムの様です。
| 赤外線フォトリフレクタの値 | 意味 |
|---|---|
| < 80 | 黒を検出している状態 |
| ≧ 80 | 白を検出している状態 |
つまり、このライントレーサーの制御方法は次のようになることが分かります。
- 黒を検出した場合、右回転
- 白を検出した場合、左回転
ここを変えるともっと楽しい!カスタムのヒント
「ライントレーサー」は、プログラムの工夫次第でさまざまな挙動にアレンジできます。
ここではプログラム上で変更できるポイントをいくつか紹介します。
モーターの速度を調整する
スピードを上げるとスリリングに、下げると安定した動きに。
初心者は低速スタートがおすすめ。
具体的な変更箇所は、プログラムの開始直後の、DCモーターの速さを設定している箇所。
数字『50』を任意の数字に変更することで対応できます。
曲がり方を調整する
ロボットが右回転するとき、左タイヤは停止状態で、右タイヤのみ動かしていますが、このとき、左タイヤを逆回転させることで、曲がり方を変えることができます。
また、左右の速度を異なる値に設定したりすると、様々なコースに対応できるようになります。
プログラムの場所は、赤外線フォトリフレクタの値を判定している箇所。
『ゆっくりとめる』と設定している箇所を変更してみましょう。
左右で異なるタイヤ速度を設定する場合は、タイヤの速さを設定するブロックが必要です。
是非、様々な動きをさせてみてください。
まとめ:基礎をしっかり学べる万能ロボット!
「ライントレーサー」は、プログラミングの基本構造(条件分岐・繰り返し・入力と出力)を実体験できる作例です。
シンプルでありながら、動きの仕組みやセンサー制御を理解することで、より深い学びに発展します。
「ただ動かすだけ」で満足せず、ぜひ自分なりに改造して、実験→失敗→改善のサイクルを楽しんでみてください。
ロボットを作ることを楽しみたい

プログラミングの基本をやさしく体験したい
プログラミングでロボットを細かくコントロールしてみたい

プログラミングで高精度な制御に挑戦したい


